
By: [William/Senior Engineering Lead at DANSKER]
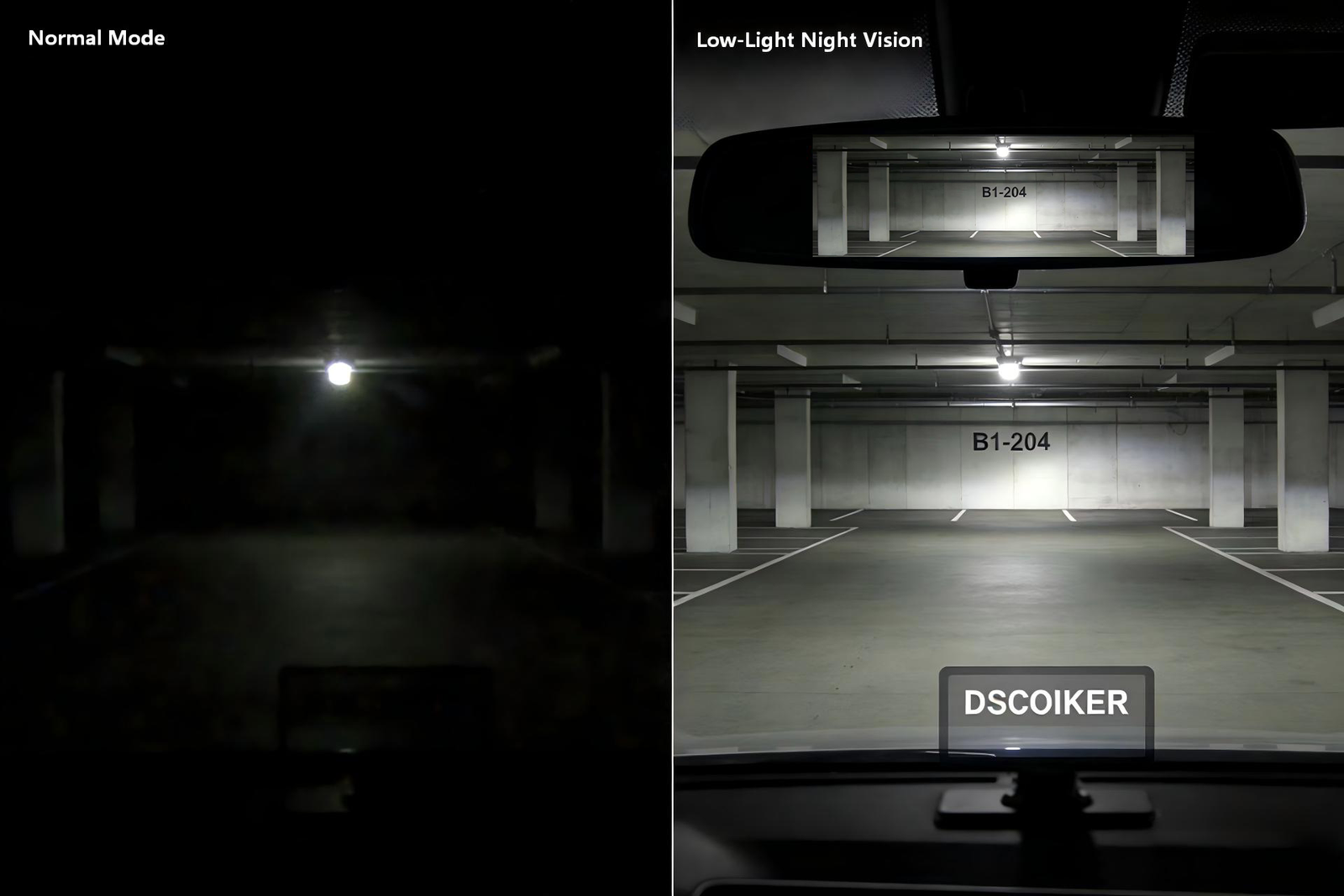
In the competitive landscape of automotive electronics, the transition from “capturing footage” to “capturing usable evidence” has been defined by one critical frontier: Low-Light Night Vision (LLNV). For a premium brand like DANSKER, catering to the rigorous demands of the North American and European markets, LLNV is not just a marketing buzzword—it is a sophisticated integration of ISP (Image Signal Processor) tuning, sensor physics, and real-time software orchestration.
As a Senior Automotive Electronics Engineer, I will break down the architectural requirements and strategic value of this technology.

1. Defining Low-Light Night Vision (LLNV) in Automotive Context
LLNV is an automated, passive sensing system designed to reconstruct high-fidelity video in environments with illuminance levels below 0.1 lux.
- Automation & Real-time Adaptivity: The system utilizes Auto-Exposure (AE) and Auto-Gain Control (AGC) algorithms that respond in milliseconds to fluctuating light (e.g., exiting a dark tunnel into streetlights).
- Passive Sensing: Unlike infrared (IR) which requires active emitters, LLNV leverages high-sensitivity CMOS sensors (like the Sony STARVIS series) to maximize photon absorption without revealing the vehicle’s presence.
- Automotive Grade Reliability: It must operate within the harsh Automotive Thermal Cycle, ensuring that sensor noise doesn’t spike as the device heats up during long drives across the scorching highways of Southern Europe or the freezing winters of Scandinavia.
2. Hardware and Software Architectural Requirements
To implement true LLNV, the Mainboard (PCB) and SoC (System on Chip) must meet stringent specifications:
- ISP & Hardware: The Image Signal Processor must support Multi-exposure HDR and hardware-level 3D Noise Reduction (3DNR). Low-end chipsets fail here because they lack the throughput to process raw data at high bit depths.
- Software Pipeline Stability: The software stack must ensure zero-latency between Capture → ISP Processing → H.265 Encoding → eMMC/SD Writing. Any “bottleneck” in the kernel-level memory management leads to dropped frames, which is unacceptable for legal evidence.
- Pixel & Frame Rate Matching: High resolution (4K) is often counterproductive for night vision if the individual pixel size (pixel pitch) is too small. We optimize for a balance, often utilizing Pixel Binning to increase the Signal-to-Noise Ratio (SNR) at the cost of slight resolution, maintaining a steady 30fps to avoid motion jitter.
- Power & Computational Loss: Running complex LLNV algorithms increases the SoC TDP (Thermal Design Power). Our engineering focus is on Instruction Set Optimization to reduce CPU overhead, preventing thermal throttling.
3. Professional Value Across Use Cases
- Individual & Parking Mode: Provides “Time-Lapse” or “Impact Detection” security in unlit residential areas, capturing license plates that standard cameras would render as black silhouettes.
- Commercial Fleets (Uber/Trucking): For long-haul logistics in the US or UK, LLNV reduces liability by clearly documenting road conditions and driver behavior during nocturnal shifts.
- Legal Evidence: High SNR video allows for Forensic Zoom, enabling authorities to identify facial features or vehicle VINs in low-light accident scenes.
4. The Necessity of Noise Reduction and Motion Compensation
In low light, increasing the “Gain” (ISO) inevitably introduces Electronic Noise (salt-and-pepper grain).
- 3DNR (Temporal Noise Reduction): Compares consecutive frames to filter out random noise while preserving static details.
- Motion Blur Suppression: Low light usually requires longer shutter speeds, causing “ghosting.” We implement Motion Adaptive Shutter Control and MEMC-like algorithms to ensure that moving objects (like a cross-traffic vehicle) remain sharp enough for OCR (Optical Character Recognition).
5. Market Viability in Europe and North America
The “Cost-to-Value” ratio for LLNV is now at an equilibrium. While it increases the BOM (Bill of Materials) by roughly 15-20% due to premium sensors and lenses (f/1.8 or wider), it drastically lowers After-Sales/RMA costs. Customers in regions like Germany or Canada have high expectations; a camera that fails to record a nighttime “hit-and-run” results in high return rates and brand damage. LLNV is a “preventative” feature that secures brand loyalty.
6. Why LLNV is Now an Industry Standard
From an engineering perspective, the “Mega-pixel Race” is over. The new frontier is Image Quality (IQ) Per Watt. LLNV has become a baseline because the automotive environment is inherently unpredictable. As an engineer, I view LLNV as the “Active Safety” component of a dash cam—it ensures the device performs its primary function (truth-telling) exactly when conditions are at their worst.
💡 Engineer’s Perspective: The Final Debug
From a hardware and software integration standpoint, Low-Light Night Vision is the ultimate stress test for a dash cam. It is where the “marketing specs” meet the “silicon reality.” As engineers at DANSKER, we don’t just chase higher resolutions; we prioritize the Signal-to-Noise Ratio (SNR) and Dynamic Range.
A 4K camera is useless if it produces a “black screen” or “digital snow” at 2:00 AM on a rain-slicked highway. Our focus remains on the ISP pipeline optimization—ensuring that every photon captured by the premium sensor is translated into high-bitrate, forensic-grade evidence without overheating the SoC. In the world of automotive safety, reliability is the only feature that truly matters when the lights go out.



